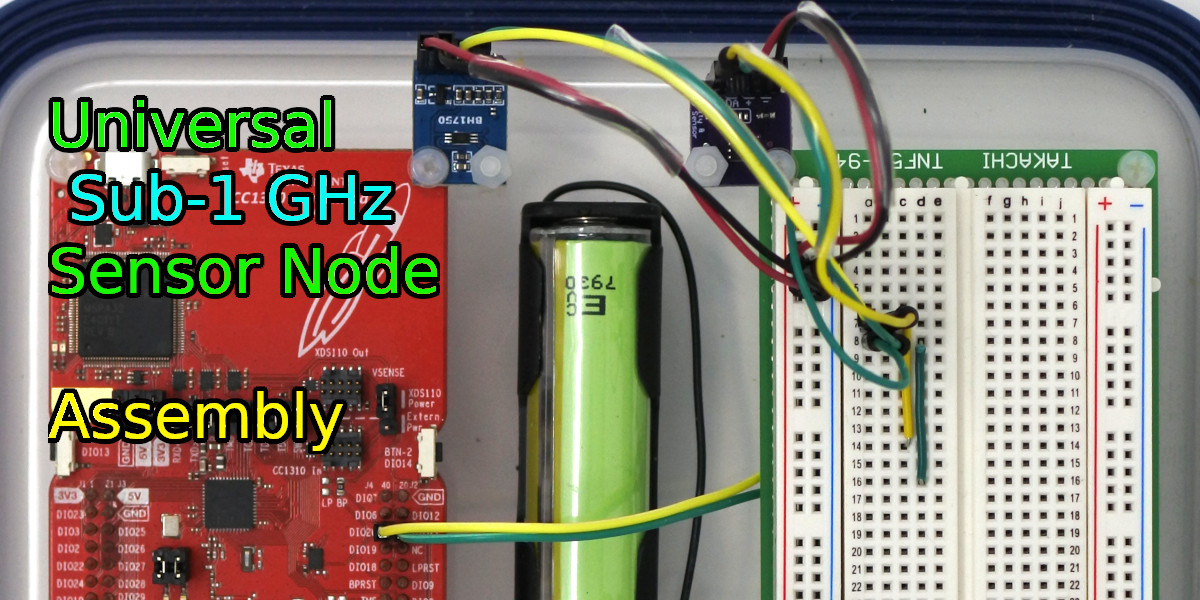
Universal Sub-1 GHz Sensor Node: Assembly
In this article I focus on the assembly of the Universal sensor node's internals, including a CC1310 LaunchPad, 18650 battery, humidity, temperature and ambient light sensors.

Photography: GIMP Histogram Exposure Correction
In this article I explain a method I use to adjust the exposure of a photograph, by using the Graphical Image Manipulation Program, aka GIMP, to modify the photo's histogram.